


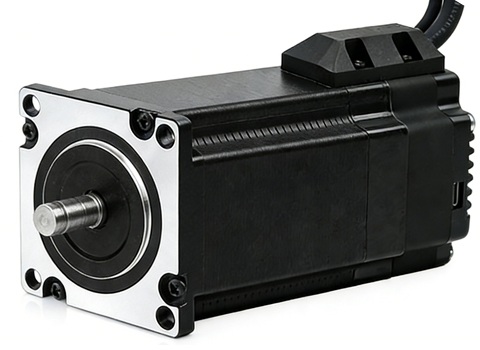
MODBUS RTU NEMA23 Absolute Encoder Integrated Stepper Motor
Multi-turn Absolute EncoderIM23ET Series NEMA23 Multi-Turn Absolute Encoder Integrated Stepper Motor (RS485 Modbus RTU)

Product Introduction
The IM23ET Series Integrated Motors represent a perfect integration of stepper drivers and stepper motors, combining the technologies of both in a single unit.
They are fully compatible with 1599-revolution mechanical absolute encoders, which not only save installation space but also streamline wiring connections.
By reducing your design and production costs, they stand as the premier choice for your stepper system solutions.
Product Advantages
- NEMA23 frame size with holding torque from 0.8 to 3.0 N·m
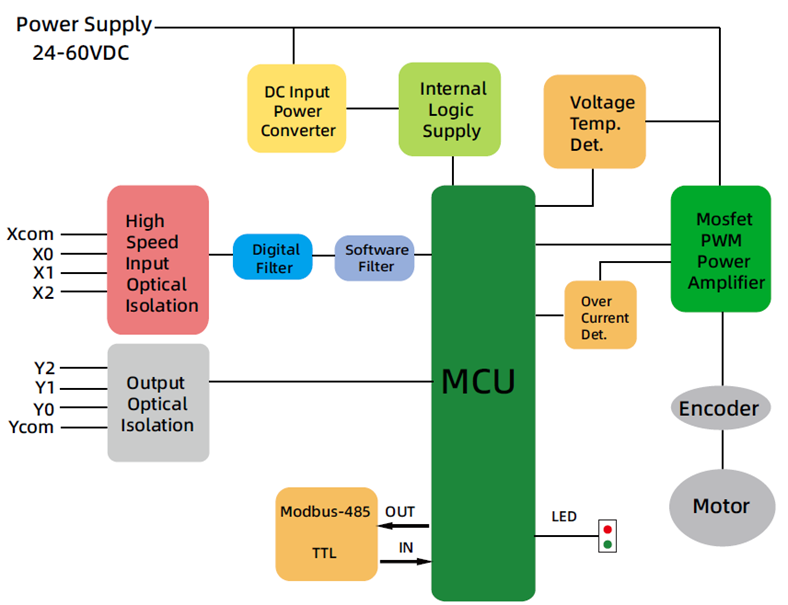
- Supply voltage: 24–60 VDC
- Supported protocols: Modbus/RTU, RS485
- Built-in programmable multi-turn feedback: 1599 revolutions; supports user-defined home position with memory, no sensor required
- Software limit function supported — more reliable than mechanical limit switches
- Closed-loop control with 4096-line (16384 counts) encoder feedback
- Torque modes supported: homing on collision, constant torque, object gripping
- Input compatible: 5–24 VDC; Output: open-collector (OC), withstanding voltage up to 30 VDC
- Comprehensive protection: over-voltage, under-voltage, over-current, winding open-circuit, and position deviation protection
- Non-volatile memory: configuration parameters stored in the on-chip FLASH of the MCU
- Wide filter frequency range: 50 kHz–5 MHz adjustable, factory default at 300 kHz
- User-friendly PC interface with full-featured functionality
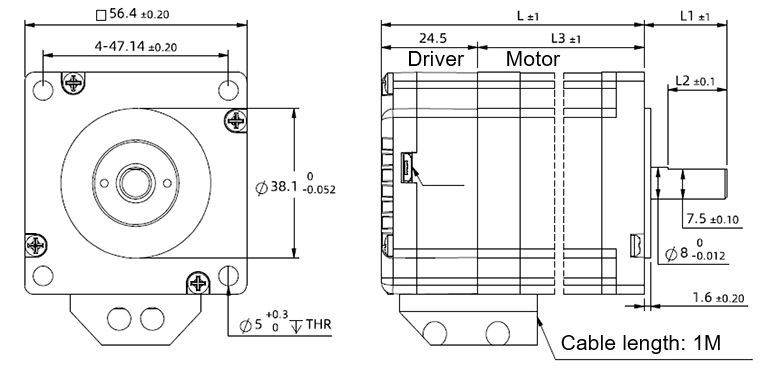
Motor Parameters
| Model No. | Total Length L (mm) | Length L1 (mm) | Shaft Dia. (mm) | Phase Current (A) | Resistance (Ω) | Inductance (mH) | Holding Torque (N.m) | Inertia (g·cm²) | Weight (g) |
|---|---|---|---|---|---|---|---|---|---|
| IM23ET12S | 92.8 | 21 | 8 | 4 | 0.44 | 1.4 | 1.2 | 280 | 820 |
| IM23ET20S | 109.8 | 21 | 8 | 5 | 0.30 | 2.0 | 2.0 | 480 | 1200 |
| IM23ET12B | 92.8 | 30 | 8 | 4 | 0.44 | 1.4 | 1.2 | 280 | 820 |
| IM23ET20B | 109.9 | 30 | 8 | 5 | 0.30 | 2.0 | 2.0 | 480 | 1200 |
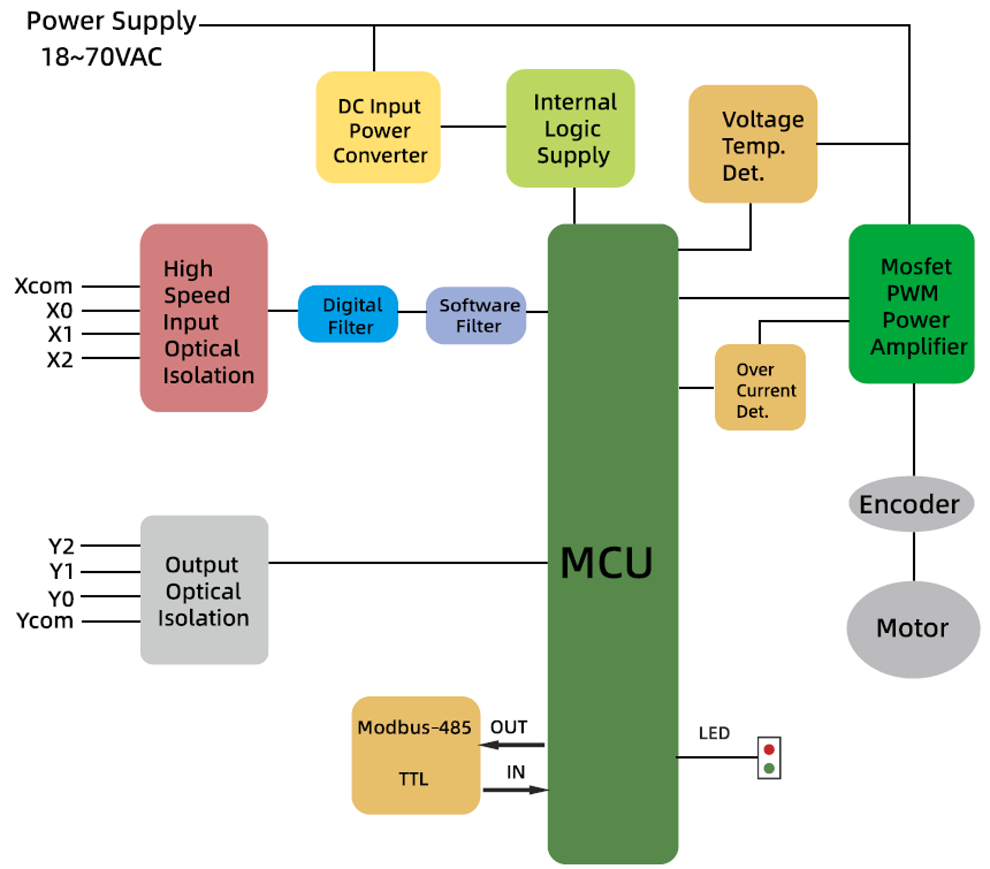
Block Diagram
Block Diagram:
Terminal Definition
RS485 Multi-turn Absolute Encoder Type Integrated Stepper Motor
| Terminal | Color | Name | Description |
|---|---|---|---|
| 1 | Red | V | 24~60 VDC |
| 2 | Black | V- | GND |
| 3 | Yellow | X com | INPUT COM, compatible with NPN and PNP |
| 4 | Yel/BLK | X0 | 3 Programmable Inputs (Active Low) Port functions configurable via commands or host computer. Pulse Mode: X0 = Pulse, X1 = Direction |
| 5 | Blue | X1 | |
| 6 | Blu/BLK | X2 | |
| 7 | Green | Y2 | Y0: Default alarm output, Normally Closed (NC) Y1: Default position reached output, Normally Closed (NC) Y2: Undefined, users may configure via commands. Can be customized to input X3 upon request. |
| 8 | Gre/BLK | Y1 | |
| 9 | Purple | Y0 | |
| 10 | Pur/BLK | Y com | OUTPUT COM, COM GND |
| 11 | Orange | 485A | RS485 Communication port, default baud rate is 115200 |
| 12 | Ora/BLK | 485B |
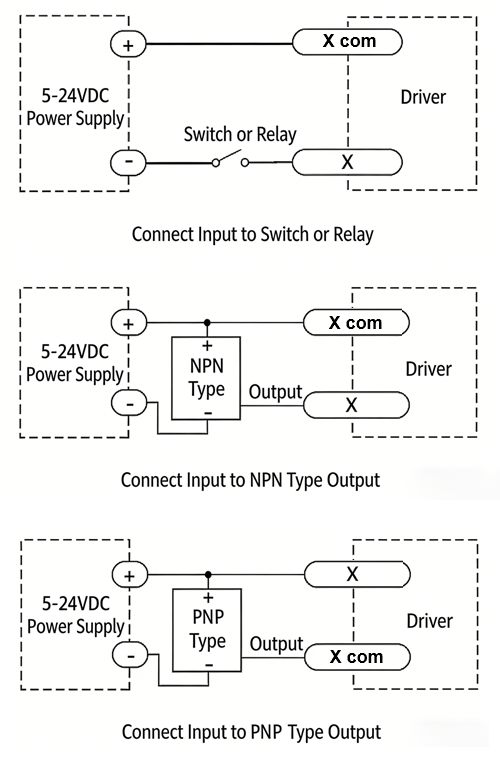
Digital Signal Input (X0-X2)
3-channel isolated digital signal input. The function of each input channel can be configured via software or commands.
| Signal | Interface | Function |
|---|---|---|
| X0 | X0, Xcom | • General Input (Default) • Pulse / Limit / Home / Emergency Stop / Speed Switch / Interrupt Positioning / Forward Rotation |
| X1 | X1, Xcom | • General Input (Default) • Pulse / Direction / Limit / Home / Emergency Stop / Speed Switch / Interrupt Positioning / Reverse Rotation |
| X2 | X2, Xcom | • General Input (Default) • Limit / Home / Emergency Stop / Speed Switch / Interrupt Positioning |
XCOM is the common positive terminal for single-ended input signals and shall be connected to the positive pole of the power supply. It only accepts sinking NPN signals.
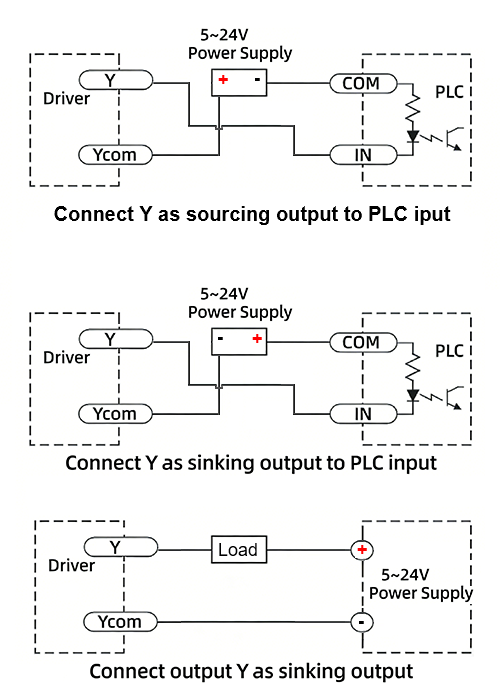
Digital Signal Output (Y0-Y2)
3-channel isolated digital signal output. The function of each output channel can be configured via software or commands.
| Signal | Interface | Function |
|---|---|---|
| Y0 | Y0, Ycom | • Alarm Output (Default) • Alarm / Position Reached / Running Status |
| Y1 | Y1, Ycom | • Position Reached Output (Closed Loop Default) • Running Status Output (Open Loop Default) • Alarm / Position Reached / Running Status |
| Y2 | Y2, Ycom | • General Purpose Output (Default) • Alarm / Position Reached / Running Status |
CRC Check Routine (C#)
{
UInt16 i,j,tmp;
UInt16 crcdata=0xFFFF;
for(i=0;i<DataLen;i )
{
crcdata=(*puchMsg)^crcdata;
puchMsg ;
for(j=0;j<8;j )
{
tmp=crcdata&0x0001;
crcdata=crcdata>>1;
if(tmp){
crcdata=crcdata^0xA001;
}
}
}
return crcdata;
}
Software & Tools
RS485 Integrated Stepper Motor Commissioning and Control Software:
Modbus Poll 
New Software in Google Drive ![]()
Adampower
Quick Start Guide
Follow the steps below:
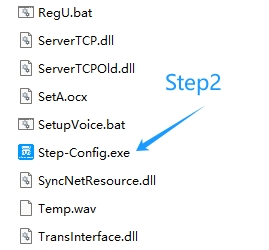
1. Extract the zip file, open CommFile folder and click Step-Config.exe or Adampower.exe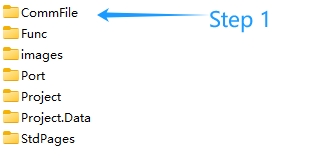
2. Open Project
3. Click Browse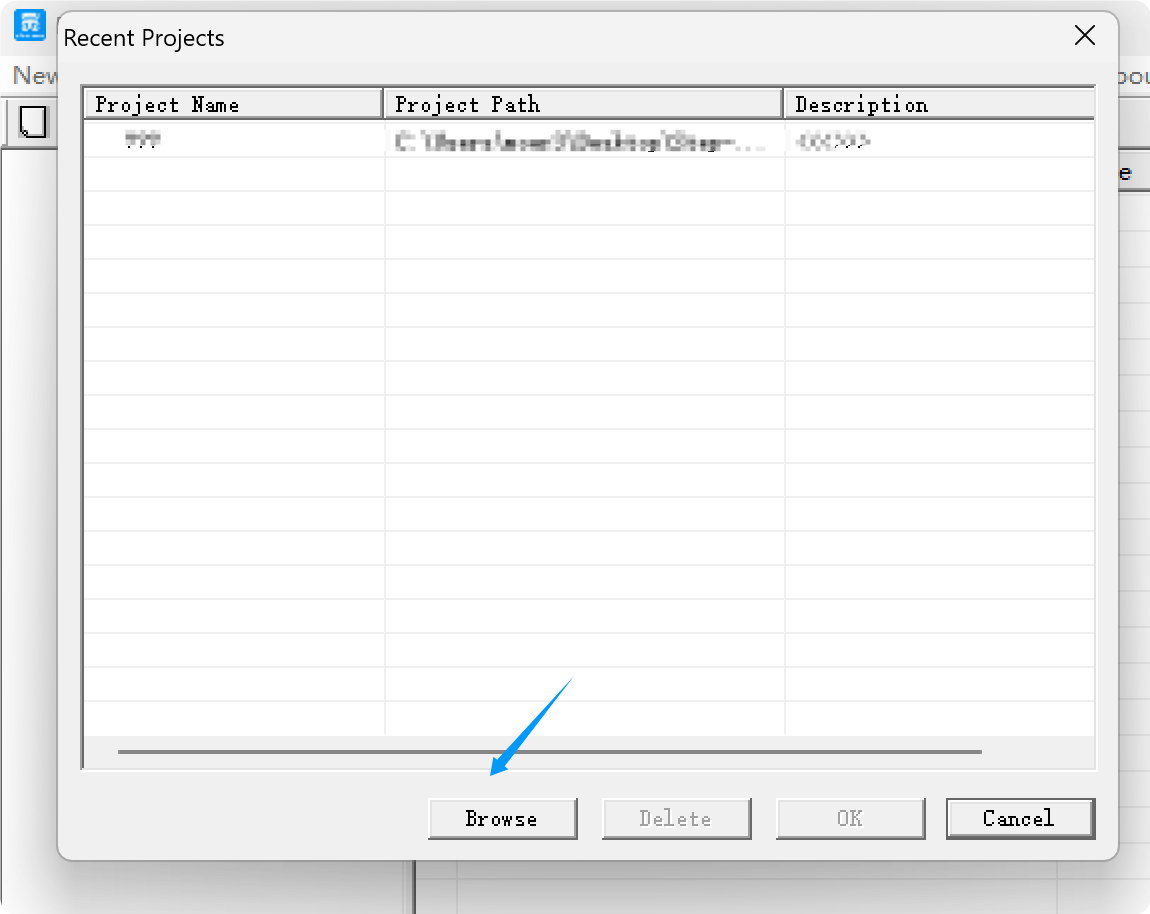
4. Select the Project.prj in the Project folder, in the same path as CommFile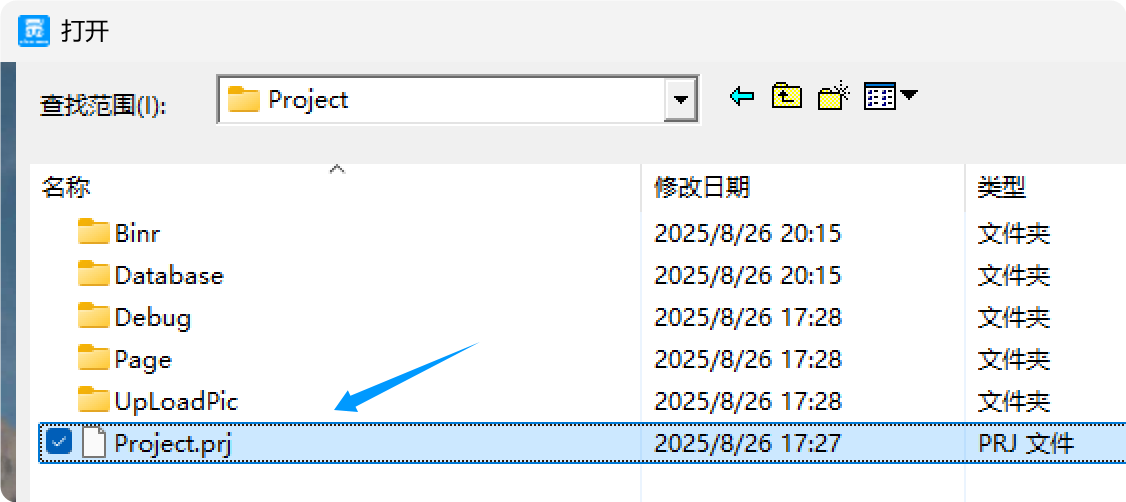
5. Double Click the Project.prj path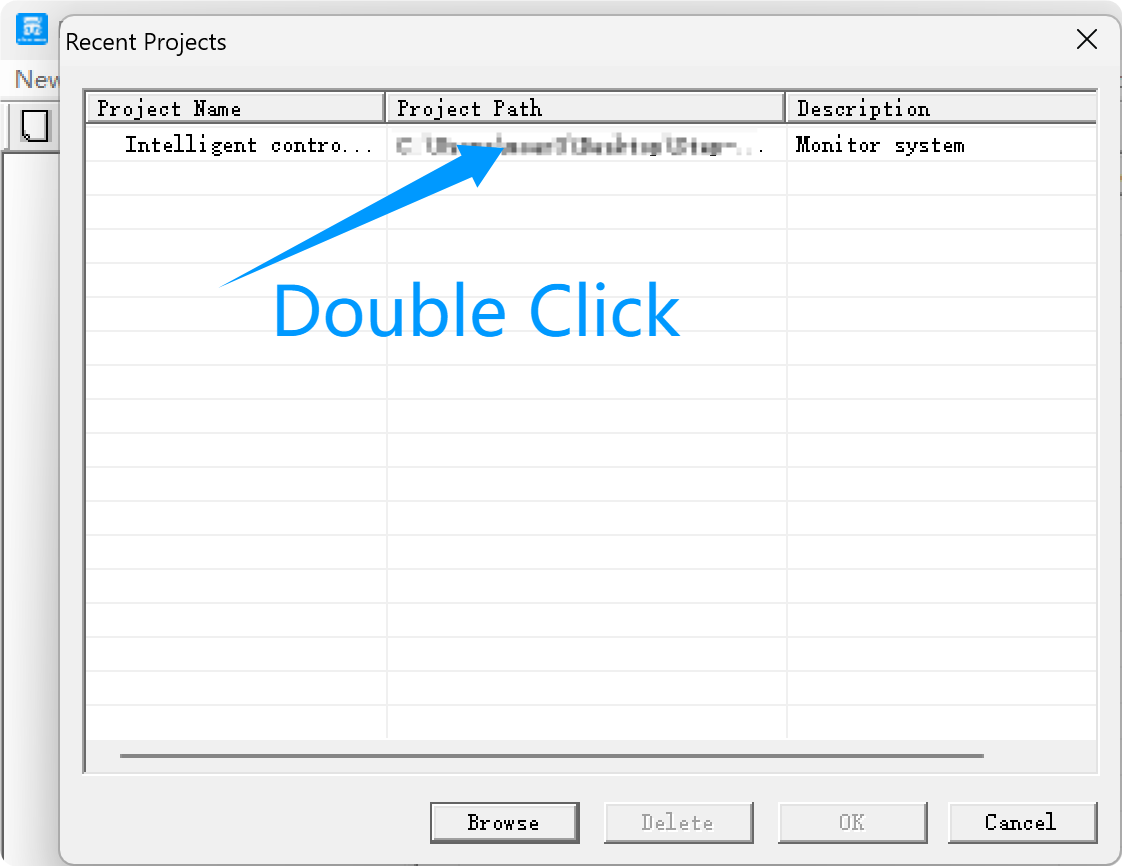
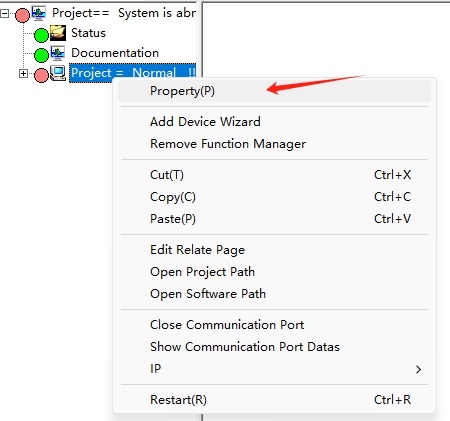
6. Right Click Modbus_485, and Click Property: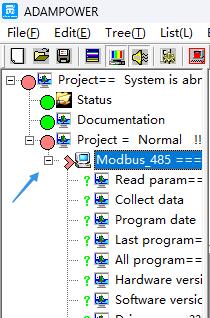
7. Click Property ComNN, Choose COM port, Baud rate and click Save and OK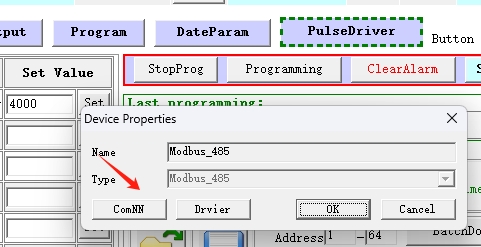

8. Start using software to control the RS485 Integrated stepper motor by below buttons: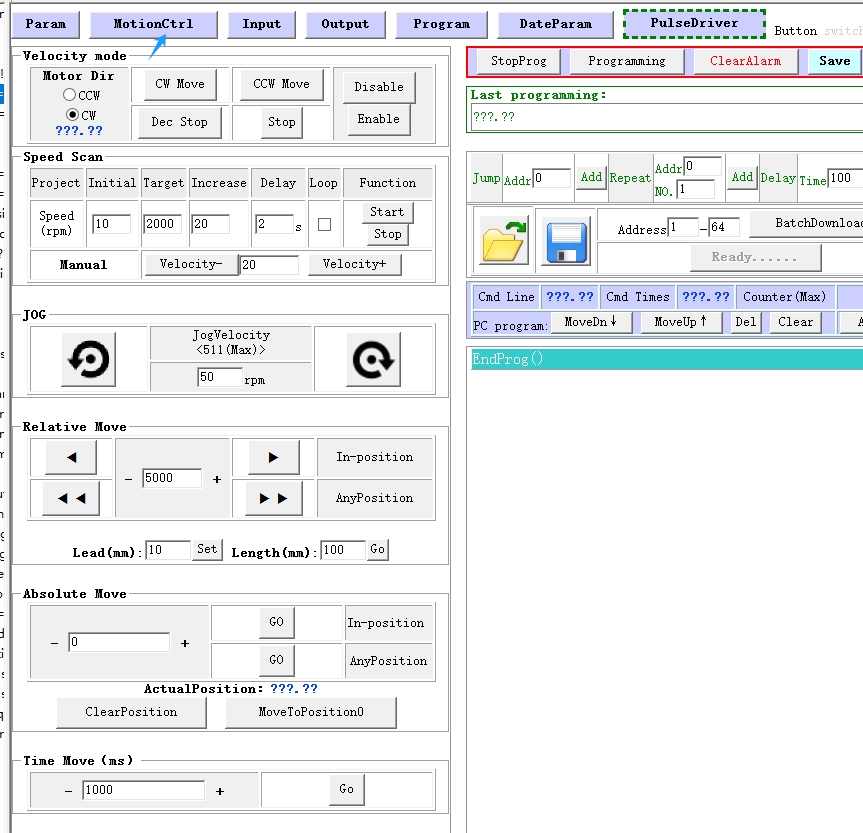

Optional: USB-TTL debugging cable
RS485 Stepper Motor Controller Commands Manual
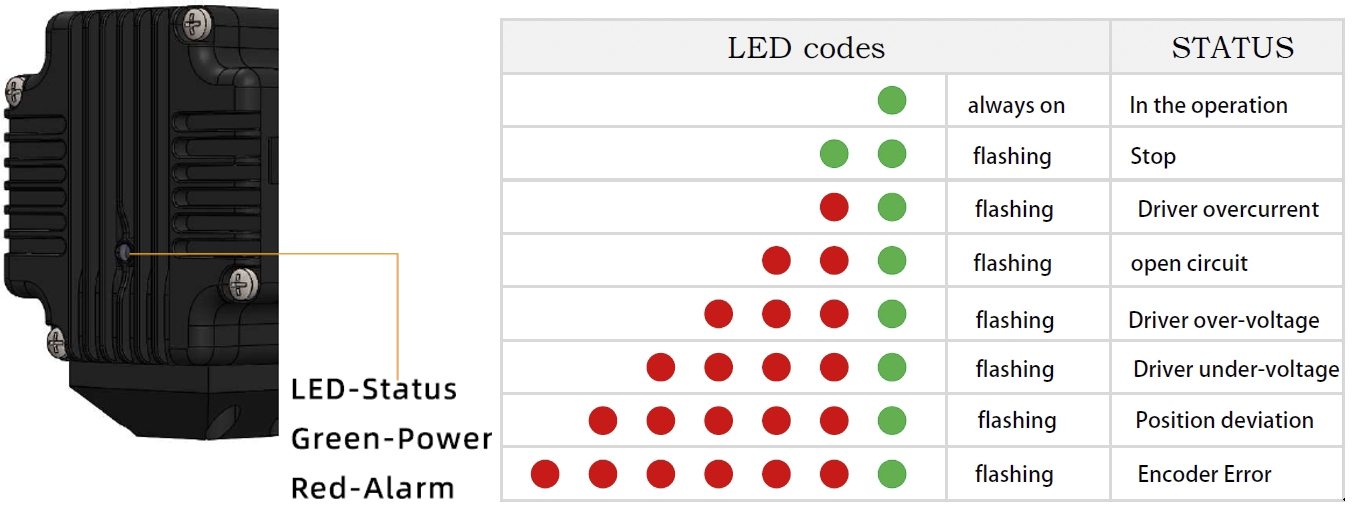
LED Indicator and Status
Application Scenarios
- CNC machine tools — Closed-loop absolute encoder feedback for precise positioning
- Automated assembly — Multi-turn absolute encoder remembers position after power loss
- Robotic grippers — Constant torque and object gripping modes supported
- Packaging machinery — Software limit more reliable than mechanical switches
More Information on detail, please feel free to contact me
- Availability: In Stock
- Model: IM23ET
- Brand: Adampower